Three minimalistic themes that provide either a full grid,
a horizontal grid, or a vertical grid. Similar to ggplot2::theme_minimal(), but with some
stylistic differences. Most importantly, these themes do not draw minor grid lines.
Also, font sizes are coordinated with theme_half_open() and with the defaults
in the save_plot() function.
theme_minimal_grid(
font_size = 14,
font_family = "",
line_size = 0.5,
rel_small = 12/14,
rel_tiny = 11/14,
rel_large = 16/14,
color = "grey85",
colour
)
theme_minimal_vgrid(
font_size = 14,
font_family = "",
line_size = 0.5,
rel_small = 12/14,
rel_tiny = 11/14,
rel_large = 16/14,
color = "grey85",
colour
)
theme_minimal_hgrid(
font_size = 14,
font_family = "",
line_size = 0.5,
rel_small = 12/14,
rel_tiny = 11/14,
rel_large = 16/14,
color = "grey85",
colour
)Arguments
- font_size
Overall font size.
- font_family
Font family for plot title, axis titles and labels, legend texts, etc.
- line_size
Line size for grid lines.
- rel_small
Relative size of small text (e.g., axis tick labels)
- rel_tiny
Relative size of tiny text (e.g., caption)
- rel_large
Relative size of large text (e.g., title)
- color, colour
Color of grid lines.
Details
theme_minimal_grid() provides a minimal grid theme. theme_minimal_hgrid() strips down
this theme even further and draws only horizontal lines, and theme_minimal_vgrid()
does the same for vertical lines.
Examples
library(ggplot2)
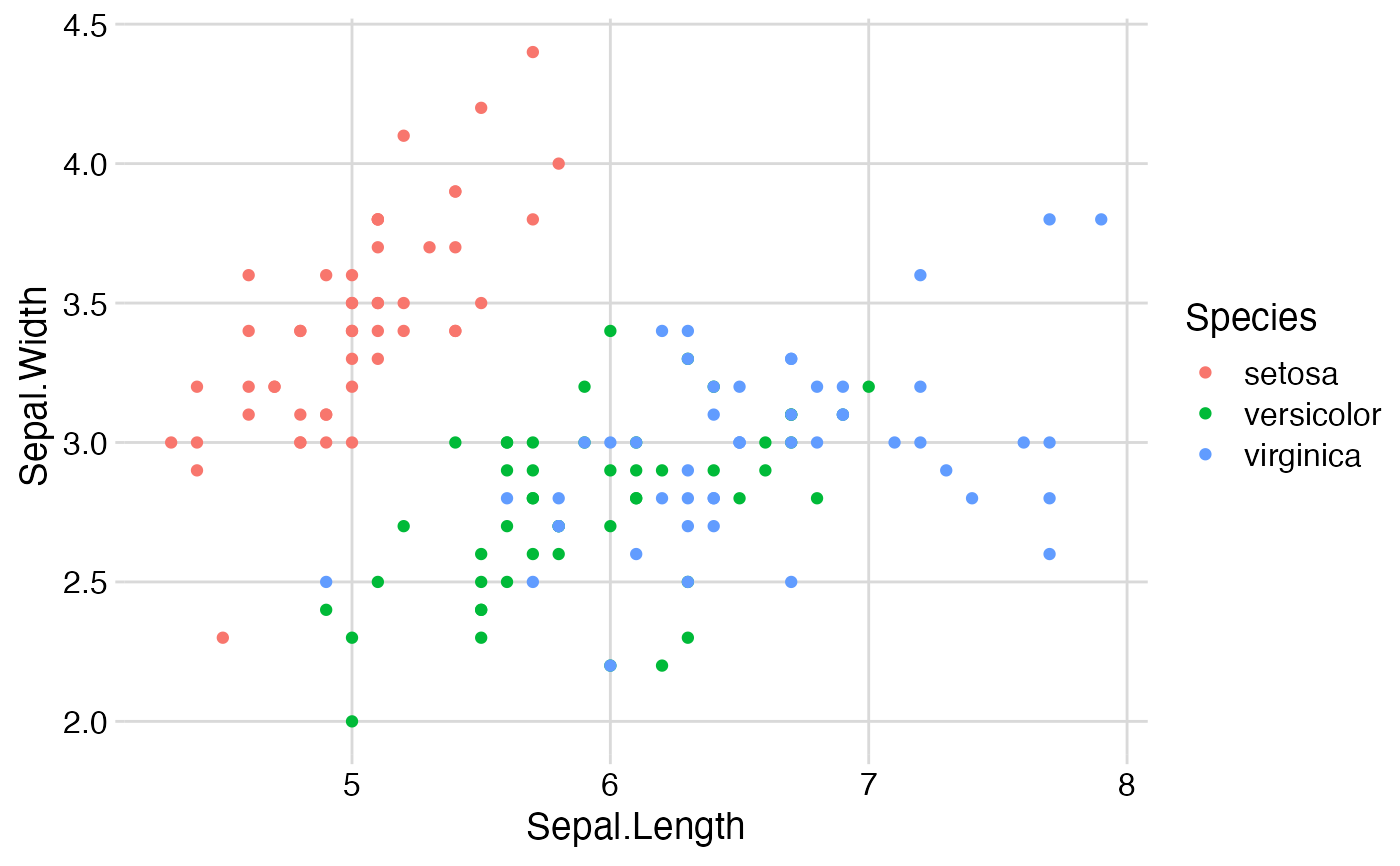
# theme_minimal_grid()
ggplot(iris, aes(x = Sepal.Length, y = Sepal.Width, color = Species)) +
geom_point() + theme_minimal_grid()
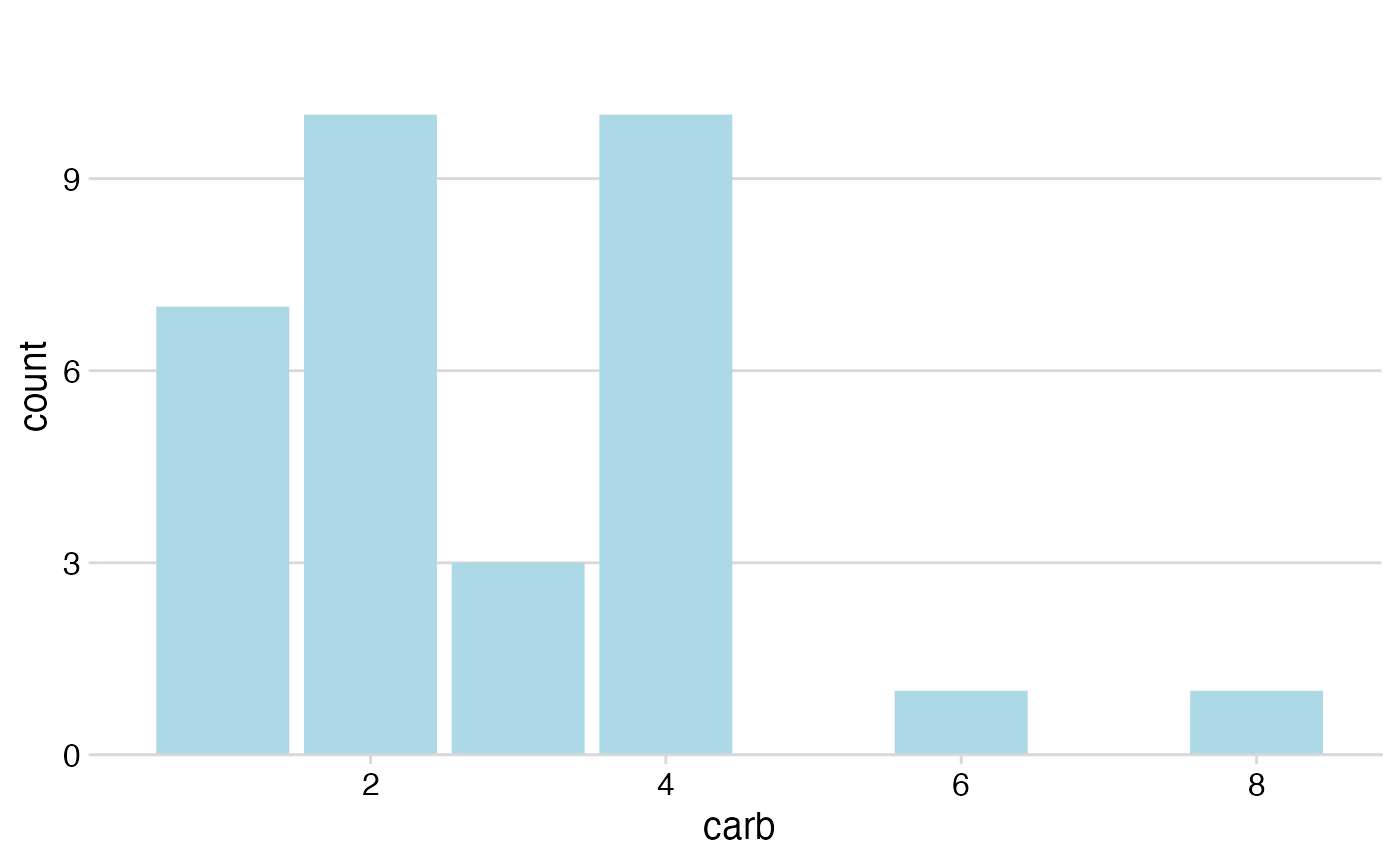
 # theme_minimal_hgrid()
ggplot(mtcars, aes(x = carb)) +
geom_bar(fill = "lightblue") +
scale_y_continuous(limits = c(0, 11.5), expand = c(0, 0)) +
theme_minimal_hgrid()
# theme_minimal_hgrid()
ggplot(mtcars, aes(x = carb)) +
geom_bar(fill = "lightblue") +
scale_y_continuous(limits = c(0, 11.5), expand = c(0, 0)) +
theme_minimal_hgrid()
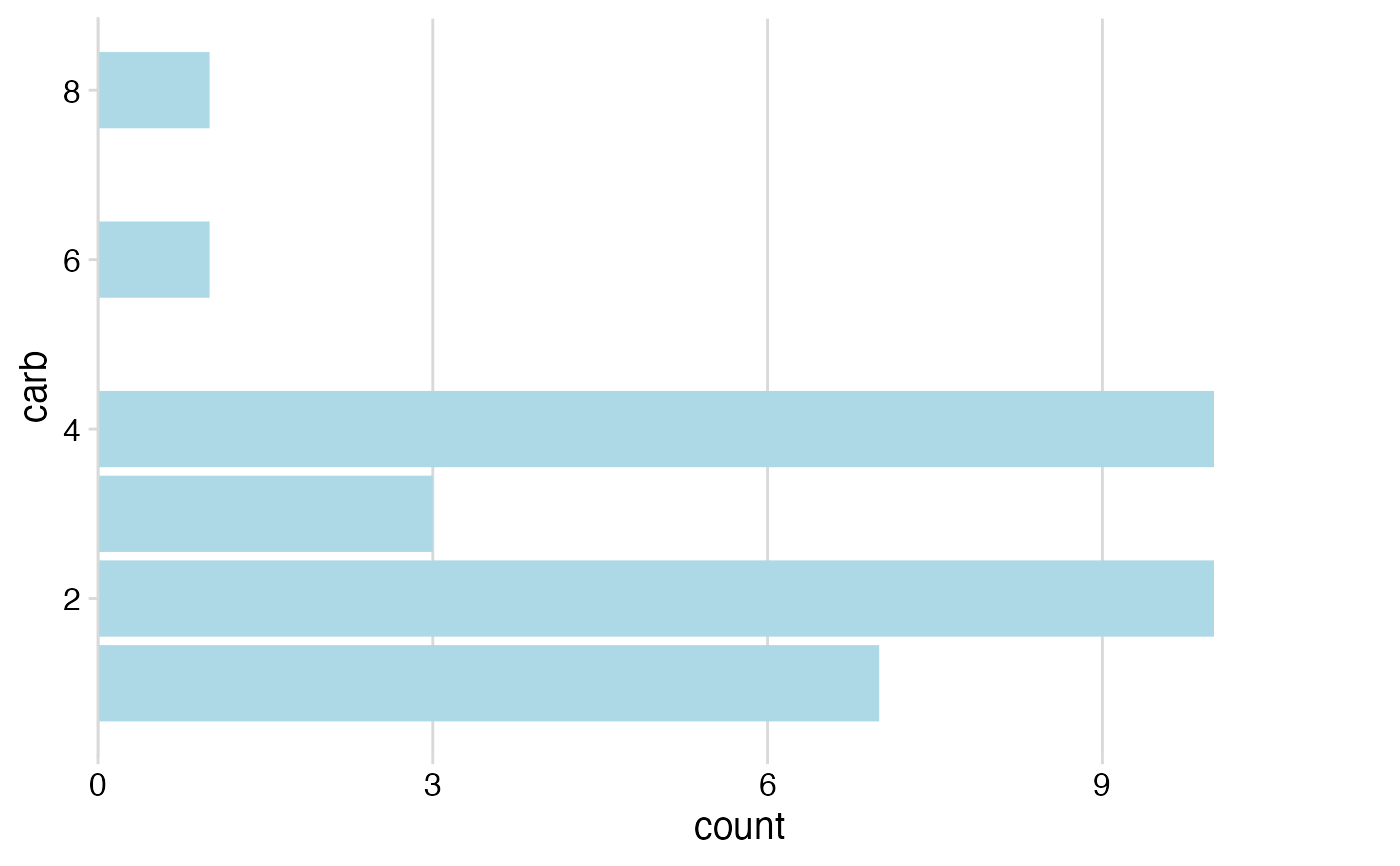
 # theme_minimal_vgrid()
ggplot(mtcars, aes(x = carb)) +
geom_bar(fill = "lightblue") +
scale_y_continuous(limits = c(0, 11.5), expand = c(0, 0)) +
coord_flip() +
theme_minimal_vgrid()
# theme_minimal_vgrid()
ggplot(mtcars, aes(x = carb)) +
geom_bar(fill = "lightblue") +
scale_y_continuous(limits = c(0, 11.5), expand = c(0, 0)) +
coord_flip() +
theme_minimal_vgrid()